Michael A. Brooks, MD, presented “Innovative Approaches to Urologic Surgery Using the State-of-the-Art DaVinci SP System” during the 24th Annual Innovations in Urologic Practice on September 13, 2019 in Santa Fe, New Mexico.
How to cite: Brooks, Michael A. “Innovative Approaches to Urologic Surgery Using the State-of-the-Art DaVinci SP System” September 13, 2019. Accessed Jul 2025. https://grandroundsinurology.com/innovative-approaches-to-urologic-surgery-using-the-state-of-the-art-davinci-sp-system/
Innovative Approaches to Urologic Surgery Using the State-of-the-Art DaVinci SP System – Summary:
Michael A. Brooks, MD, discusses the practical advantages and limitations of the recently FDA-approved da Vinci Single Port (SP) robotic system for urologic procedures. He reviews surgical videos of pyeloplasty, retropubic radical prostatectomy, and perineal salvage prostatectomy procedures using this system.
Abstract:
Following the FDA approval of the first da Vinci robotic surgical system in 2000, minimally invasive urologic surgery has evolved significantly. Multiple subsequent da Vinci systems have been released since then, each iteration featuring incremental improvements.
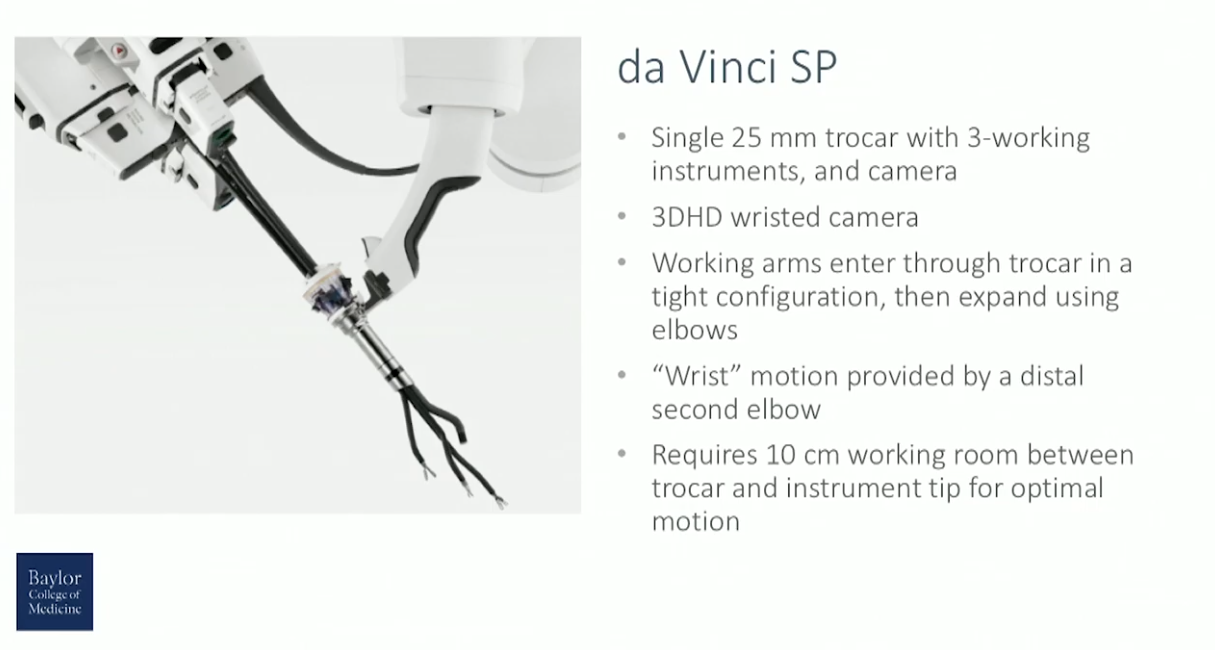
The newest generation robot, FDA-approved in June 2018, is the da Vinci Single Port (SP) robotic system, which allows for the control of three working instruments and a wristed camera through a single 25 mm trocar.
Although there is a lack of robust data pertaining to this system, Jihad H. Kaouk, MD, and his team at the Cleveland Clinic have successfully performed surgeries using the da Vinci SP system.
This presentation includes surgical videos from Dr. Brooks’ experience, as well as from Jihad H. Kaouk, MD, and a team at Cleveland Clinic. The cases depicted include pyeloplasty, retropubic radical prostatectomy, and perineal salvage prostatectomy. In general, the advantages of single-port robotic surgery include ideal cosmetic results, minimized incisions, quick set-up and closure, and optimized recovery with minimal postoperative incisional pain. This system is specifically advantageous in its optimal visualization due to the camera’s wristed action.
Limitations of the system include that it requires 10 cm of working room between the trocar and the instrument tip for optimal motion. Also, while the arms have axial rigidity, lateral motion can be weak, which can affect sewing capabilities.
Future directions for this system include potential applications in trans-abdominal partial nephrectomy, retroneoscopic partial nephrectomy, radical cystectomy, primary retroperitoneal lymph node dissection, renal transplantation, adult reconstruction, and pediatric reconstruction.
About the 24th Annual Innovations in Urologic Practice
Innovations in Urologic Practice (Innovations) is an annual, multi-day, CME-accredited conference devoted to innovative diagnostic and treatment strategies for and controversies related to some of the most common urologic problems in the current era. The topics covered include oncological management of the bladder, kidney, and prostate. The conference also emphasizes general urology topics in pelvic reconstruction and trauma, men’s health, and infections in the urology patient. Dr. Smith presented this lecture during the 24th Innovations in 2019. Please visit this page in order to register for future Innovations meetings.
ABOUT THE AUTHOR
Michael A. Brooks, MD, is an Assistant Professor of Urology and Oncology at Baylor College of Medicine in Houston, Texas. Dr. Brooks graduated from Baylor College Of Medicine with his medical degree in 2011. He is also affiliated with the Cleveland Clinic in Cleveland, Ohio. In his practice, he specializes in treating prostate cancer, erectile dysfunction, prostatitis, bladder issues, and other urologic disorders.